Улучшение хватания роботов за счет тактильного восприятия
Введение в роботизированное хватание
Важность роботизированного хватания
Роботизированный захват является краеугольным камнем роботизированных манипуляций, позволяя машинам взаимодействовать с объектами в окружающей среде. Будь то сборка деталей на заводе или сбор продуктов дома, способность надежно захватывать объекты имеет фундаментальное значение для функционирования роботов в различных областях.
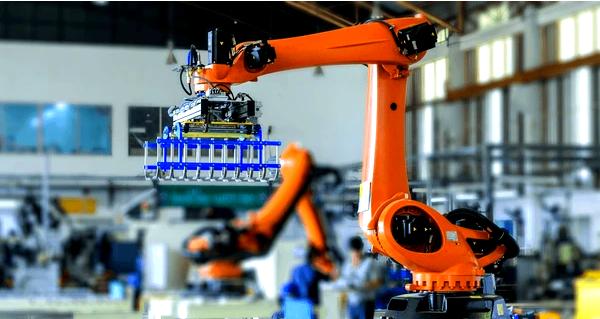
В промышленности роботизированный захват играет ключевую роль в решении задач, начиная от производства и сборки и заканчивая логистикой и складскими операциями. Например, в автомобилестроении роботы, оснащенные сложными возможностями захвата, могут обрабатывать деликатные компоненты с точностью и эффективностью, оптимизируя производственные процессы и повышая общую производительность. Аналогичным образом, на складах электронной коммерции роботы, оснащенные передовыми алгоритмами захвата, могут быстро подбирать и упаковывать товары для отправки, сокращая время выполнения заказа и повышая удовлетворенность клиентов.
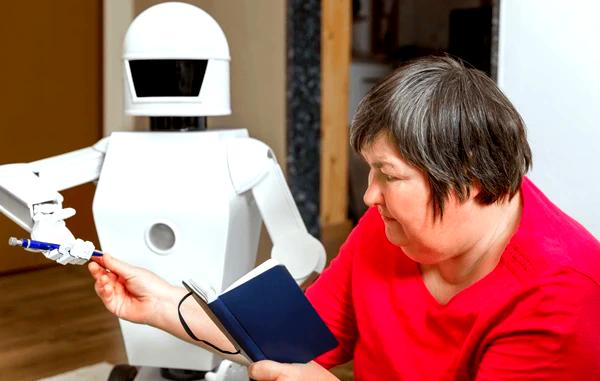
Помимо промышленных условий, роботизированный захват обладает огромным потенциалом для улучшения повседневной жизни. Представьте себе робота, способного помогать людям с ограниченными возможностями, ловко доставая предметы или выполняя работу по дому. Такие достижения потенциально могут произвести революцию в здравоохранении и уходе за пожилыми людьми, обеспечив большую независимость и качество жизни миллионам людей по всему миру.
Хотя важность роботизированного захвата неоспорима, традиционные подходы к этой проблеме часто были ограничены такими факторами, как недостаточная надежность и адаптивность. Традиционные методы обычно полагаются на предопределенные стратегии захвата, основанные на геометрических моделях или предопределенных точках захвата, которые могут с трудом справляться с изменениями формы, размера и текстуры объекта. В результате роботам может быть трудно надежно захватывать объекты в реальных сценариях, что приводит к неэффективности и ошибкам при выполнении задач.
Более того, традиционные подходы к захвату роботами могут не в полной мере использовать богатую сенсорную информацию, доступную роботам, особенно тактильную обратную связь. Тактильное восприятие - способность ощущать и интерпретировать силу контакта и текстуру поверхности - имеет решающее значение для точной настройки действий захвата и обеспечения безопасного манипулирования объектами. Интегрируя технологии тактильного зондирования в роботизированные системы захвата, исследователи могут повысить способность робота адаптировать свой захват в ответ на изменяющиеся условия окружающей среды, повышая надежность и универсальность в различных областях применения.

Таким образом, роботизированный захват является фундаментальным аспектом роботизированных манипуляций с далеко идущими последствиями для промышленности и повседневной жизни. Хотя традиционные подходы имеют свои ограничения, продолжающиеся исследования в области тактильного восприятия и усовершенствованных алгоритмов захвата обещают раскрыть весь потенциал роботизированного захвата в различных контекстах.
Роль тактильного восприятия

Вы когда-нибудь задумывались, как роботы могут подбирать предметы с такой точностью? Ну, все дело в тактильном восприятии! Тактильное восприятие в робототехнике - это как наделение робота чувством осязания, позволяющее ему чувствовать и понимать окружающий мир. Представьте, если бы вам завязали глаза и пришлось поднимать предметы - вы бы в значительной степени полагались на свое осязание, чтобы оценить их размер, форму и текстуру. Аналогичным образом роботы, оснащенные тактильными датчиками, могут ‘чувствовать’ объекты, с которыми они обращаются, что крайне важно для таких задач, как хватание.

Тактильные датчики, по сути, кончики пальцев роботов, играют жизненно важную роль в улучшении хватательных способностей. Эти датчики предназначены для имитации человеческого осязания, обеспечивая обратную связь роботу о свойствах объектов, с которыми он взаимодействует. Например, они могут определять форму и текстуру объекта, а также величину усилия, прилагаемого при захвате. Эта информация позволяет роботу соответствующим образом регулировать захват, обеспечивая надежное удержание без повреждения объекта.
Одним из ключевых преимуществ тактильной обратной связи является ее способность улучшать задачи манипулирования. Точно так же, как вы регулируете захват, когда держите хрупкий стакан, роботы могут использовать тактильную информацию для бережного обращения с хрупкими предметами. Например, робот с тактильными датчиками мог бы аккуратно взять спелый помидор, не раздавив его, благодаря обратной связи, которую он получает о мягкости и спелости плода. Без этого тактильного восприятия робот мог бы приложить слишком много усилий и в конечном итоге устроить беспорядок!
На собственном опыте работы с роботами я воочию убедился в том, какую разницу может иметь тактильное восприятие. Во время проекта, в котором использовались роботизированные руки, мы заметили, что включение тактильных датчиков значительно улучшило способность робота захватывать объекты различных форм и размеров. Благодаря тактильной обратной связи робот смог адаптировать свой захват в режиме реального времени, что сделало его гораздо более универсальным и надежным при обращении с различными предметами.
Более того, тактильное восприятие направлено не только на повышение точности хватания - оно также улучшает общее взаимодействие между роботами и окружающей их средой. Наделяя роботов чувством осязания, они могут лучше ориентироваться в сложной обстановке и безопасно взаимодействовать с людьми. Например, робот, оснащенный тактильными датчиками, может обнаружить, когда он соприкасается с препятствием, что позволяет ему корректировать свои движения, чтобы избежать столкновений.
Кроме того, тактильное восприятие меняет правила игры в области робототехники, особенно когда речь заходит об улучшении хватания роботов. Предоставляя роботам способность ‘чувствовать’ свое окружение, тактильные датчики позволяют им обращаться с объектами с точностью и изяществом, улучшая задачи манипулирования и общие возможности взаимодействия. Итак, в следующий раз, когда вы увидите робота, деликатно поднимающего предмет, вы будете знать, что все это благодаря его осязанию!
Понимание тактильных ощущений
Определение и функциональность
Понимание тактильных ощущений имеет решающее значение в области робототехники, особенно для улучшения хватательных способностей роботов с помощью тактильного восприятия. Но что такое тактильное восприятие и как оно влияет на функциональность роботизированных систем?
По своей сути, тактильное восприятие относится к способности машины или робота воспринимать и интерпретировать физические стимулы посредством прикосновения. Другими словами, оно позволяет роботам воспринимать и понимать окружающий мир, ‘ощупывая’ объекты так же, как это делают люди. Эта возможность необходима для выполнения задач, требующих деликатного манипулирования, таких как захват предметов различной формы, размера и текстуры.
Одним из замечательных аспектов тактильного восприятия является его способность имитировать прикосновения человека. Точно так же, как кончики наших пальцев могут различать текстуру, форму и твердость предмета, тактильные датчики в роботах обеспечивают аналогичную обратную связь. Такая имитация человеческого прикосновения позволяет роботам более интуитивно и эффективно взаимодействовать с окружающей средой, что делает их более адаптируемыми к различным задачам и средам.
В робототехнике используется несколько типов тактильных датчиков, каждый из которых обладает своим набором преимуществ и применений. Одним из распространенных типов являются резистивные датчики, которые измеряют изменение сопротивления при приложении давления. Эти датчики относительно просты и экономичны, что делает их пригодными для широкого спектра применений - от простого обнаружения объектов до более сложных систем тактильной обратной связи.
Другим типом тактильных датчиков являются емкостные датчики, которые обнаруживают изменения емкости в результате деформации или контакта с объектом. Эти чувствительные датчики могут предоставлять точную информацию о форме и текстуре объекта, что делает их идеальными для задач, требующих тонкой манипуляции и ловкости.
Пьезоэлектрические датчики - это еще один тип тактильных сенсоров, широко используемых в робототехнике. Эти датчики генерируют электрические сигналы в ответ на механическое воздействие или деформацию, позволяя роботам обнаруживать даже незначительные изменения давления и силы. Такая чувствительность делает пьезоэлектрические датчики ценными для применений, где точность имеет первостепенное значение, таких как хирургическая робототехника и протезирование.
Оптические тактильные датчики используют свет для обнаружения изменений давления или контакта. Измеряя изменения интенсивности света или отражения, эти датчики могут предоставить подробную информацию о свойствах поверхности объекта, включая текстуру, шероховатость и форму. Хотя оптические тактильные датчики обеспечивают высокое разрешение и точность, они могут быть более чувствительны к факторам окружающей среды, таким как рассеянный свет и пыль.
Таким образом, тактильные ощущения играют решающую роль в улучшении хватательных способностей роботов за счет тактильного восприятия. Имитируя прикосновения человека, тактильные датчики позволяют роботам более эффективно взаимодействовать с окружающей средой, что приводит к повышению производительности и универсальности в различных областях применения. Имея в наличии различные типы тактильных датчиков, робототехники могут выбрать наиболее подходящий вариант, исходя из конкретных требований своего проекта, что в конечном итоге расширяет возможности роботизированных систем в различных отраслях промышленности.
Интеграция в роботизированные системы
Когда речь заходит об улучшении хватательных способностей роботов, понимание тактильных ощущений является ключевым фактором. Тактильные датчики играют решающую роль в обеспечении способности роботов воспринимать окружающую среду с помощью прикосновений. Однако интеграция этих датчиков в роботизированные системы сопряжена с рядом проблем.
Одной из основных задач при интеграции тактильных датчиков в роботизированные системы является обеспечение плавного встраивания в руки робота. Руки робота должны быть оснащены датчиками, имитирующими осязание человека, позволяющими им распознавать различные текстуры, формы и усилия и реагировать на них. Это требует тщательного проектирования и инжиниринга, чтобы гарантировать правильную интеграцию датчиков в конструкцию руки без ущерба для ее функциональности.
Для решения этой задачи и облегчения внедрения тактильных датчиков в руки робота были разработаны различные методы. Один из подходов предполагает встраивание датчиков непосредственно в кончики пальцев или ладонь роботизированной руки, что позволяет им напрямую взаимодействовать с объектами во время выполнения задач по захвату. Другой метод заключается в использовании гибких или податливых сенсорных материалов, которые легко встраиваются в поверхность ладони, обеспечивая более естественное и интуитивно понятное восприятие.
Обработка данных в режиме реального времени необходима для эффективного тактильного восприятия в роботизированных системах. Тактильные датчики генерируют большие объемы данных, поскольку они непрерывно собирают информацию о взаимодействии робота с окружающей средой. Обработка этих данных в режиме реального времени позволяет роботу быстро анализировать изменения в окружающей среде и реагировать на них, что позволяет более точно и ловко манипулировать объектами.
Важность обработки данных в режиме реального времени становится особенно очевидной в задачах, требующих деликатного и точного восприятия, таких как сбор хрупких предметов или выполнение задач в динамичных средах. Обрабатывая тактильную обратную связь в режиме реального времени, роботы могут корректировать свой захват в ответ на незначительные изменения свойств объекта или условий окружающей среды, повышая общую производительность и надежность.
Несмотря на связанные с этим трудности, интеграция тактильных датчиков в роботизированные системы обладает огромным потенциалом для развития робототехники. Повышая способность роботов воспринимать окружающую среду и взаимодействовать с ней посредством прикосновения, тактильное зондирование открывает новые возможности для применения в таких областях, как производство, здравоохранение и геологоразведка.
Кроме того, понимание тактильных ощущений и их интеграция в роботизированные системы необходимы для расширения возможностей захвата роботами. Преодоление таких проблем, как плавное внедрение в руки робота и внедрение методов обработки данных в режиме реального времени, являются важными шагами на пути к полной реализации потенциала тактильного восприятия в робототехнике. По мере дальнейшего развития технологий будущее открывает перед тактильными ощущениями захватывающие возможности для создания следующего поколения роботизированных систем.
Достижения в области тактильного восприятия
Новые технологии
В области робототехники достижения в области тактильного восприятия революционизируют способы взаимодействия роботов с окружающим миром. Представьте себе робота, способного аккуратно взять яйцо, не разбивая его, или точно определить текстуру поверхности. Недавние инновации в области тактильного восприятия приблизили нас к этой реальности.
Одним из самых захватывающих достижений в области тактильного восприятия является использование новых материалов. Эти материалы имитируют свойства человеческой кожи, позволяя роботам ощущать давление, температуру и текстуру с поразительной точностью. Например, исследователи разработали гибкие датчики из силиконовой резины, которые могут обнаруживать даже малейшие изменения давления, позволяя роботам захватывать предметы мягко и точно.
В дополнение к новым материалам исследователи также изучают инновационные конструкции датчиков. Традиционные тактильные датчики часто жесткие и громоздкие, что ограничивает их применение в робототехнике. Однако недавние достижения привели к разработке тонких, гибких датчиков, которые могут быть легко интегрированы в руки и пальцы роботов. Эти датчики обеспечивают обратную связь в режиме реального времени с системой управления роботом, позволяя ему регулировать свой захват в ответ на изменения в окружающей среде.
Влияние этих достижений на хватательные способности роботов трудно переоценить. Оснащая роботов тактильным восприятием, они могут взаимодействовать с объектами более естественным и интуитивным образом. Это не только повышает их эффективность и точность, но и расширяет спектр задач, которые они могут выполнять. Например, роботы, оснащенные тактильными датчиками, могут безопасно обращаться с хрупкими предметами, ориентироваться в сложных условиях и даже помогать при проведении деликатных хирургических процедур.
Кроме того, тактильное восприятие повышает безопасность взаимодействия человека и робота. Благодаря способности ощущать силу, прилагаемую к объекту, роботы могут регулировать свой захват для предотвращения несчастных случаев и минимизации ущерба. Это особенно важно в условиях, где роботы работают бок о бок с людьми, например, на производственных предприятиях или в медицинских учреждениях.
Заглядывая в будущее, можно сказать, что будущее тактильного восприятия в робототехнике имеет огромные перспективы. Поскольку исследователи продолжают расширять границы материаловедения и сенсорных технологий, мы можем ожидать еще большего прогресса в возможностях захвата роботами. Будь то сбор фруктов на ферме или выполнение сложных задач в лаборатории, роботы, оснащенные тактильным восприятием, будут играть все более важную роль в нашей жизни.
Машинное обучение и тактильные данные
В захватывающем мире робототехники достижения в области тактильного восприятия революционизируют способы взаимодействия роботов с окружающей средой. Одной из ключевых областей разработок является роботизированное хватание, где тактильные данные играют решающую роль в повышении способности робота манипулировать объектами с точностью и ловкостью.
Алгоритмы машинного обучения находятся на переднем крае этой инновации, позволяя роботам учиться на основе тактильных данных, собранных с помощью датчиков, встроенных в кончики пальцев или захваты. Эти алгоритмы позволяют роботам интерпретировать и понимать полученную сенсорную информацию, что в конечном итоге со временем улучшает их хватательные способности.
Обучая модели с использованием тактильных данных, роботы могут совершенствовать свои методы захвата и адаптироваться к различным формам, размерам и текстурам объектов. Этот процесс обучения включает в себя предоставление алгоритмам помеченных тактильных данных, таких как распределение давления, текстура и информация о форме, чтобы научить робота эффективно захватывать объекты.
Одним из ключевых преимуществ использования машинного обучения в роботизированном захвате является его способность обрабатывать сложные и разнообразные тактильные данные. В отличие от традиционных методов программирования, которые полагаются на предопределенные правила, алгоритмы машинного обучения могут автоматически извлекать закономерности и информацию из данных, позволяя роботам захватывать объекты более гибким и адаптивным образом.
Обучение с подкреплением также играет важную роль в совершенствовании стратегий захвата. При обучении с подкреплением роботы учатся методом проб и ошибок, получая обратную связь о своих действиях и соответствующим образом корректируя свое поведение для достижения желаемого результата, такого как успешное захватывание объекта.
Благодаря обучению с подкреплением роботы могут постоянно совершенствовать свои стратегии захвата, исследуя различные подходы и извлекая уроки из своих успехов и неудач. Этот итеративный процесс позволяет роботам разрабатывать надежные и эффективные методы захвата, адаптированные к конкретным задачам и окружающей среде.
Более того, обучение с подкреплением позволяет роботам адаптироваться к динамичным и неопределенным условиям, таким как изменение положения объекта или трение поверхности. Постоянно обновляя свои стратегии захвата на основе обратной связи в режиме реального времени, роботы могут поддерживать высокую производительность даже в непредсказуемых сценариях.
Кроме того, интеграция машинного обучения и тактильных данных способствует значительному прогрессу в области захвата роботами. Используя алгоритмы машинного обучения и методы обучения с подкреплением, роботы могут извлекать уроки из тактильной обратной связи, чтобы улучшить свои способности к захвату и адаптироваться к разнообразным условиям. Поскольку исследования в этой области продолжают развиваться, мы можем ожидать, что роботы станут еще более опытными в манипулировании объектами с точностью и маневренностью, открывая новые возможности для применения в производстве, здравоохранении и за его пределами.
Применение усовершенствованного роботизированного хватания
Промышленная автоматизация
Представьте себе мир, в котором роботы могут чувствовать, приспосабливаться и захватывать объекты с изяществом человеческой руки. Это область усовершенствованного захвата роботов с помощью тактильного восприятия, передовой технологии, революционизирующей промышленную автоматизацию.
На производстве точность имеет первостепенное значение. Способность роботов захватывать объекты и манипулировать ими с точностью и адаптивностью может существенно повлиять на эффективность производства. В отличие от традиционных роботов, ограниченных запрограммированными движениями, роботы с тактильной поддержкой могут ощущать и регулировать свой захват на основе обратной связи в режиме реального времени, расширяя свои возможности при обращении с деликатными предметами или предметами неправильной формы.
Одно из важнейших применений усовершенствованного роботизированного захвата - на сборочных линиях. Представьте себе робота, которому поручено собирать сложную электронику. Благодаря тактильному восприятию он может деликатно обращаться с хрупкими компонентами, регулируя захват, чтобы обеспечить надежную посадку без причинения повреждений. Такой уровень точности не только повышает качество продукции, но и снижает необходимость вмешательства человека, оптимизируя производственный процесс.
Тематические исследования из различных отраслей промышленности подчеркивают повышение эффективности, достигаемое с помощью роботов с поддержкой тактильных ощущений. Например, в автомобилестроении роботы, оснащенные тактильными датчиками, могут точно захватывать и устанавливать мелкие детали, такие как винты и соединители, сокращая время сборки и сводя к минимуму ошибки. Аналогичным образом, в индустрии упаковки пищевых продуктов роботы, обладающие тактильным восприятием, могут обращаться с деликатными предметами, такими как фрукты, не оставляя на них синяков, что приводит к повышению качества упаковки и сокращению отходов продукции.
Потенциальная экономия средств, связанная с роботизированным захватом с поддержкой тактильных ощущений, существенна. Сокращая потребность в ручном труде и сводя к минимуму ошибки при обращении, компании могут снизить производственные затраты и повысить общую прибыльность. Кроме того, повышенная эффективность и согласованность, обеспечиваемые роботами с поддержкой тактильных ощущений, могут привести к сокращению сроков выполнения работ и увеличению производительности, позволяя производителям удовлетворять растущий спрос без значительных вложений в дополнительные ресурсы.
Помимо экономии средств и повышения эффективности, усовершенствованный роботизированный захват обещает трансформировать отрасли, выходящие за рамки производства. От здравоохранения до логистики способность роботов воспринимать объекты и манипулировать ими с ловкостью, подобной человеческой, открывает целый мир возможностей. В здравоохранении роботы с поддержкой тактильных ощущений могут помогать хирургам в деликатных процедурах, улучшая результаты лечения пациентов и снижая количество хирургических осложнений. В логистике роботы, оснащенные тактильным восприятием, могут эффективно обрабатывать посылки различных форм и размеров, оптимизируя складские операции и ускоряя сроки доставки.
Кроме того, усовершенствованное роботизированное хватание за счет тактильного восприятия представляет собой смену парадигмы в промышленной автоматизации. Позволяя роботам воспринимать окружающую среду и адаптироваться к ней в режиме реального времени, эта технология повышает точность, эффективность и гибкость в производстве и за его пределами. Обладая потенциалом снижения производственных затрат, увеличения производственных мощностей и открытия новых областей применения в различных отраслях промышленности, роботы с поддержкой тактильных ощущений готовы революционизировать наш образ жизни и работы.
Здравоохранение и вспомогательная робототехника
Достижения в области робототехники произвели революцию в здравоохранении, вызвав волну инноваций в медицинской робототехнике. Одной из замечательных областей, где эти достижения проявляются, является усовершенствованное роботизированное хватание за счет тактильного восприятия. Эта технология позволяет роботам воспринимать и понимать мир с помощью прикосновений, имитируя чувствительность и ловкость человеческих рук.
В области медицины тактильное восприятие играет решающую роль в хирургической робототехнике. Представьте себе робота, помогающего хирургу во время деликатных процедур. С помощью тактильных датчиков робот может определять свойства тканей, отличать здоровую ткань от пораженной и соответствующим образом регулировать захват, сводя к минимуму повреждение тканей и улучшая результаты операции.
Более того, тактильное восприятие трансформирует ландшафт протезирования. Интегрируя тактильные датчики в протезы конечностей, исследователи стремятся повысить ловкость и чувствительность. Это означает, что люди с ампутированными конечностями могут восстановить чувство осязания, что позволяет более естественно взаимодействовать с окружающей средой. Такие задачи, как поднятие хрупких предметов или ощущение текстуры различных поверхностей, становятся выполнимыми, что значительно улучшает качество жизни пользователей протезов.
Еще одно интересное применение усовершенствованного роботизированного хватания - в задачах по уходу. Роботы, оснащенные тактильным восприятием, могут оказывать более эффективную помощь людям, нуждающимся в уходе. Будь то помощь пожилым пациентам в повседневной деятельности или поддержка людей с ограниченными возможностями, эти роботы могут адаптировать свой захват и давление в зависимости от потребностей пациента, обеспечивая безопасность и комфорт.
Кроме того, тактильное восприятие улучшает взаимодействие человека и робота, делая задачи по уходу более интуитивными и эффективными. Роботы могут лучше понимать человеческие жесты и намерения, что приводит к более плавному сотрудничеству между людьми и машинами. Это особенно полезно в ситуациях, когда требуются точные манипуляции и нежные прикосновения, например, при оказании помощи пациентам в передвижении или реабилитационных упражнениях.
Помимо улучшения ухода за пациентами, тактильная робототехника также приносит пользу медицинским работникам. Хирурги могут выполнять минимально инвазивные процедуры с большей точностью и контролем благодаря роботам, оснащенным тактильными датчиками. Протезисты могут более точно настраивать протезные устройства, приспосабливая их к уникальным потребностям и предпочтениям каждого пациента.
В целом, интеграция тактильного восприятия в медицинскую робототехнику открывает огромные перспективы для будущего здравоохранения. От хирургической помощи до инноваций в области протезирования и поддержки ухода за больными усовершенствованное роботизированное хватание революционизирует наш подход к решению задач здравоохранения. Устраняя разрыв между человеческим прикосновением и возможностями роботов, эти достижения прокладывают путь к более безопасному и персонализированному медицинскому обслуживанию.
Направления и задачи на будущее
Роботизированное восприятие в неструктурированной среде
Представьте себе робота, пытающегося поднять различные предметы с захламленного стола. Некоторые предметы маленькие, некоторые странной формы, и все они перемешаны. Этот сценарий представляет собой лишь одну из многих проблем, связанных с захватом роботами в неструктурированной среде.
В таких непредсказуемых условиях роботы сталкиваются с многочисленными препятствиями. Им приходится сталкиваться с объектами различных размеров, форм и текстур, перемещаясь в загроможденных пространствах. Традиционные подходы к захвату роботами, которые полагаются исключительно на визуальные данные, часто с трудом справляются с этими сложностями.
Введите тактильное восприятие, которое изменит правила игры в стремлении улучшить хватание роботов. Интегрируя тактильные датчики в руки роботов, машины получают способность ‘чувствовать’ свое окружение. Это осязание позволяет им собирать ценную информацию о свойствах объекта, таких как его текстура, форма и твердость.
В загроможденных пространствах тактильное восприятие играет решающую роль в обеспечении надежного схватывания. Когда одних визуальных данных может быть недостаточно из-за помех или плохого освещения, тактильная обратная связь заполняет пробелы. Пробираясь на ощупь сквозь груду предметов, роботы могут определять подходящие точки захвата и регулировать свой захват в режиме реального времени, что приводит к более надежным манипуляциям.
Но потенциал тактильного восприятия выходит за рамки повышения точности захвата. Это открывает двери для автономного исследования и обучения. Точно так же, как люди учатся с помощью осязания, роботы, оснащенные тактильными датчиками, могут исследовать окружающую среду, обнаруживая новые объекты и совершенствуя свои стратегии захвата с течением времени.
Представьте себе робота, которому поручено перебирать корзину с разнообразными предметами. Благодаря тактильному исследованию он учится различать различные объекты на основе их тактильных свойств. С каждым взаимодействием он совершенствует свое понимание того, как эффективно манипулировать объектами, постепенно становясь более искусным в решении задач.
Автономное исследование и обучение открывают перспективы для улучшения хватания роботов в неструктурированных средах. Позволяя роботам адаптироваться и улучшать свои хватательные способности на основе опыта, мы приближаемся к машинам, которые могут выполнять широкий спектр задач в реальных условиях.
В стремлении улучшить хватку роботов первостепенное значение имеет решение задач в непредсказуемых условиях. Используя тактильное восприятие и автономные исследования и обучение, мы прокладываем роботам путь к тому, чтобы они могли легко и ловко ориентироваться в загроможденных пространствах, приближая нас к будущему, в котором роботы органично интегрируются в нашу повседневную жизнь.
Этические и социальные последствия
Поскольку мы углубляемся в сферу улучшения хватания роботов за счет тактильного восприятия, крайне важно учитывать более широкие этические и социальные последствия. Одной из главных проблем является потенциальная потеря работы. Поскольку роботы становятся все более искусными в выполнении задач, традиционно выполняемых людьми, существует риск того, что некоторые рабочие места устареют. Это может привести к экономическим сбоям и перемещению работников в затронутых отраслях.
Для решения этой проблемы важно инвестировать в программы переподготовки и образовательные инициативы, чтобы обучить работников навыкам, необходимым для новых ролей в робототехнике и смежных областях. Кроме того, директивные органы должны изучить такие стратегии, как всеобщий базовый доход, для поддержки людей, на чьи средства к существованию может повлиять автоматизация.
Равноправный доступ к тактильным технологиям является еще одним важным фактором. Хотя эти достижения открывают огромные перспективы для повышения эффективности и качества жизни, существует риск усугубления существующего неравенства, если доступ не будет распределен справедливо. Необходимо приложить усилия для обеспечения того, чтобы маргинализованные сообщества имели равный доступ к этим технологиям, будь то посредством государственных субсидий, общественных инициатив или другими средствами.
Этические дилеммы, связанные с автономным манипулированием и принятием решений, также выходят на первый план. По мере того, как роботы приобретают большую автономию в своих действиях, возникают вопросы о том, кто несет ответственность за их решения и поступки. Существует необходимость в надежных этических рамках, которыми можно руководствоваться при разработке и внедрении этих технологий, с акцентом на прозрачность, подотчетность и приоритетность благополучия человека.
Кроме того, необходимо серьезно отнестись к соображениям, касающимся потенциального неправильного использования роботов с поддержкой тактильных ощущений. Без надлежащих мер предосторожности эти технологии могут использоваться в злонамеренных целях, создавая риски для отдельных лиц и общества в целом. Следует разработать этические руководящие принципы и нормативно-правовую базу для снижения этих рисков и обеспечения ответственного и этичного использования роботов с поддержкой тактильных ощущений.
При решении этих сложных этических и социальных задач важное значение будет иметь сотрудничество между политиками, исследователями, заинтересованными сторонами отрасли и членами сообщества. Работая сообща, мы можем использовать преобразующий потенциал робототехники с поддержкой тактильных ощущений, одновременно защищая от потенциального вреда и гарантируя, что эти технологии принесут пользу обществу в целом.
Краткое изложение ключевых моментов
Итак, подводя итог всему вышесказанному, мы рассмотрели некоторые важные моменты, касающиеся улучшения хватания роботов с помощью тактильного восприятия.
Прежде всего, давайте поговорим о том, почему тактильное восприятие так чертовски важно. Видите ли, когда роботы могут чувствовать предметы с помощью своих сенсоров, это как бы наделяет их сверхспособностями. Это то, что помогает им понять, как хвататься за предметы, не сминая их и не роняя, как горячую картофелину.
Теперь давайте углубимся в детали того, как мы делаем все это возможным. Благодаря некоторым замечательным достижениям в области сенсорных технологий и машинного обучения роботы все лучше чувствуют окружающее. Эти датчики могут распознавать самые разные вещи, такие как текстуру, форму и даже то, какое давление нужно приложить, когда берешь что-то в руки.
Но подождите, это еще не все! Это не просто крутая научная фантастика. Нет, эти достижения уже находят применение во всевозможных приложениях реального мира. Представьте себе: роботы помогают на фабриках, аккуратно собирая крошечные устройства, не потея. Или представьте, что они протягивают руку (или, ну, коготь) в больницах, выполняя деликатные операции с точностью и заботой.
И эти улучшения имеют значение не только на фабриках и в больницах. Нет, мы говорим о целом ряде отраслей, которые выигрывают от более совершенных манипуляций роботов. Подумайте о сельском хозяйстве, где роботы могут аккуратно срывать спелые плоды с деревьев, не повреждая их. Или логистика, где они могут с легкостью сортировать посылки, следя за тем, чтобы ваши онлайн-заказы доставлялись к вашему порогу без царапин.
Итак, вот оно - небольшое резюме того, почему тактильное восприятие имеет такое большое значение в мире робототехники. С достижениями в области сенсорных технологий и машинного обучения, стимулирующими прогресс, и с таким количеством приложений, пожинающих плоды, становится ясно, что мы стоим на пороге роботизированной революции. И, эй, кто знает, каких удивительных вещей мы сможем достичь в следующий раз? Небо - это предел!
Перспективы на будущее
Заглядывая в будущее, можно сказать, что будущее роботизированного захвата, усиленного тактильным восприятием, имеет огромные перспективы. Представьте себе роботов, которые могут деликатно обращаться с хрупкими предметами с той же легкостью и точностью, что и человеческая рука. Это достижение потенциально может революционизировать отрасли, начиная от производства и здравоохранения и заканчивая логистикой и сельским хозяйством.
На производстве тактильное восприятие может привести к созданию более эффективных сборочных линий, где роботы беспрепятственно работают бок о бок с людьми, повышая производительность и безопасность. В здравоохранении роботы, оснащенные тактильными датчиками, могли бы помогать хирургам в деликатных процедурах, снижая риск человеческой ошибки и улучшая результаты лечения пациентов.
Более того, в логистике роботы с улучшенными захватными способностями могли бы оптимизировать складские операции, что привело бы к более быстрому выполнению заказов и снижению затрат. В сельском хозяйстве роботы могли бы помочь в сборе деликатных фруктов и овощей, сведя к минимуму повреждения и отходы.
Непрерывные исследования и разработки в области тактильной робототехники имеют решающее значение для раскрытия ее полного потенциала. По мере развития технологий исследователи должны совершенствовать алгоритмы, разрабатывать более чувствительные датчики и улучшать интеграцию тактильной обратной связи в роботизированные системы. Это постоянное новшество гарантирует, что роботы смогут захватывать объекты и манипулировать ими с возрастающей ловкостью и надежностью.
Кроме того, сотрудничество и междисциплинарный подход необходимы для прогресса в этой области. Инженеры, специалисты по информатике, нейробиологи и эксперты из различных других дисциплин должны работать сообща, чтобы решать сложные задачи, связанные с тактильной робототехникой. Объединяя свой опыт, исследователи могут ускорить разработку новаторских технологий и более эффективно удовлетворять потребности реального мира.
Кроме того, перспективы будущего роботизированного хватания, усиленного тактильным восприятием, невероятно радужны. Обладая потенциалом для преобразования отраслей промышленности и улучшения бесчисленных аспектов нашей жизни, тактильная робототехника представляет собой смену парадигмы в области робототехники. Инвестируя в непрерывные исследования и укрепляя сотрудничество между различными экспертами, мы можем раскрыть весь потенциал этой технологии и вступить в новую эру инноваций и прогресса.